饮料生产过程中,饮料灌装液位精度受灌装设备的硬件状况和定量灌装控制系统控制策略的影响会出现瓶装饮料液位高度波动。影响因素通常有饮料的液体特性及饮料内的固态成分、灌装设备故障、自动补偿控制系统调控策略等,因而灌装作业中瓶装饮料会出现灌装液位差。灌装后的液位高度检测可以帮助厂家确保质量、控制成本,长期出现灌装过量会造成原料需求量增加,企业利润减少;缺量饮料流入市场,会造成企业的信誉损失,从而影响消费者消费决策。通过液位检测可以反馈生产设备状态,出现大量灌装高度不合格饮料时,及时反馈错误,设备根据反馈信号及时调整参数修正错误,保障生产安全,提高生产效率。
瓶装饮料液位检测依赖光电传感器发出视觉检测程序触发“开关”,配合压力传感器测量、电容式传感器等对灌装液位进行检测,自机器视觉检测技术应用后,在大部分PET饮料瓶质量检测、灌装后液位检测多采用光电传感器触发检测开关,配合图像处理算法构成检测系统。早期基于Opencv液位识别方法识别速度较慢,目前多数以光电传感器作为液位检测图像处理程序的触发器。
随着机器视觉技术的成熟,目前机器视觉识别速度已能达到高速生产检测的要求。使用机器视觉在饮料生产中作为检测触发程序,不仅可以降低检测系统硬件使用量,集成化检测系统,还能快速对检测内容定位和调度检测程序,并且可以简化检测系统设备结构,弥补传感器冗杂的系统硬件布局缺点,提高系统效率和可靠性。饮料生产线视觉检测系统背景较为简单,因而更容易区分检测目标,图像中信息量少,配合图像处理方法识别液位高度也就越快。本研究在YOLOv7基础上参考饮料生产中饮料瓶质量检测和饮料液位检测方法,设计整套系统在背光照明的条件下实现瓶装饮料液位检测的快速识别和定位,并验证了识别速度与识别准确率,为实现高速液位检测提供识别模型,并快速定位液位区域,为液位高度检测程序提供触发指令,取代光电传感器作为检测程序的触发器。
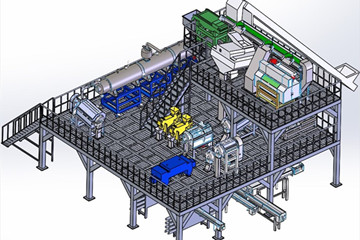
待采集的饮料瓶放置于传送带上,传送带宽25 cm;传送带一侧设置CMOS传感器海威工业相机,型号为MV-CE060-10UC,8 mm焦距镜头,采集图像分辨率为3 072像素×2 048像素;另一侧正对摄像头设置背光板,背光板尺寸30 cm×60 cm,可满足市场上大部分300~650 m L饮料瓶的高度,以此模拟生产的环境,其实际布局如图1所示。在采集图像试验台上采集不同类型瓶装饮料液位。为获得更好的液位特征完善识别模型,采集时以量筒测量后确定的饮料标准净含量液位面为高度参考面,采集了俯视、平视和仰视3个视角的图像作为学习样本,采集图像如图2所示。
已验证YOLOv7能够正常且准确识别和框定液位,通过改进YOLOv7结构(图7),使得该算法更加适用于瓶装饮料液位识别与框定,在实际生产检测中与检测程序更加契合。
YOLOv7基于空间金字塔池化结构(Spatial Pyramid Pooling,SPP),通过跨阶段局部网络CSPNet结构设计的一种SPPCSPC的空间金字塔池化结构
(1)提出的基于YOLOv7网络模型单幅图像关键目标识别时间10.7 ms及非极大值抑制(NMS)处理时间1.4 ms,识别并定位平均耗时12.1 ms,模型占71.3 MB存储空间。证明该模型对饮料关键检测目标识别与定位的可行性,替换传统传感器作为瓶装饮料液位高度检测的图像识别程序的触发器,可实现实时的检测触发。
(2)识别模型可实时输出识别框的像素位置数据,图像处理程序根据框位置可直接从图像中截取识别目标进行基于图像处理的实时识别。
(3)对多种处理后图像的试验验证表明,该模型具有抗干扰检测能力,并且在暗光、颜色失真、加噪点和混合多类饮料且多噪点情况下也能识别目标,能够对多种饮料瓶液位识别。